
Accelerating the Motor Control revolution Using New MCU and FPGA Solutions
Motors provide the muscle for electronic controls to interact with the physical world. Whether in transportation, process control, robotics, appliances or even just opening a garage door, motors are the primary movers in our connected and controlled world. Electric motors account for a large percentage – some estimates put them at as much as 45 percent* – of our total global electricity consumption, so it’s no wonder that recent motor control advances have focused on efficiency improvements over the lifetime of the motor. Advanced motor control algorithms use a significant amount of processing power, so many of these algorithms require MCUs and FPGAs with advanced processing capabilities.
Fortunately, a new generation of motor control solutions is leveraging not only advanced hardware features, but are also completing development environments with boards and software to dramatically simplify even complex motor control algorithm applications. Field-oriented control (FOC) and brushless DC (BLDC) motor control approaches illustrate device features, vendor-provided development platforms and advanced software support now available for motor control applications.
Device Architecture
MCUs and FPGAs have both added new features to provide the computational capabilities required by new motor control algorithms. For example, Xilinx Zynq® All Programmable SoCs have on-chip dedicated CPUs and an extensive peripheral subsystem to make them more efficient for motor control. When CPU capabilities need to be enhanced, the FPGA fabric is available to provide advanced DSP capabilities for even the most advanced algorithm. MCUs have added new features for motor control as well. Two of the most important are hardware DSP support, to speed motor control algorithm processing, and flexible pulse width modulation (PWM) timers, so that common motor control waveforms can be generated with very little CPU overhead. These features are perhaps best demonstrated when they are used as part of a hardware development platform featuring application code libraries and full reference designs.
Hardware Development Kits
Hardware reference designs are a critical element in speeding time to market for complex electromechanical applications. Seeing the physical results of a design, quickly, is the best way to speed development so vendors are typically providing development platforms for even the most demanding motor control applications. For example, Avnet, Xilinx and Analog Devices have combined their motor control expertise to create a complete motor control platform for BLDC, permanent magnet synchronous motor (PMSM), brushed DC and stepper motors. The platform even includes a reference design running Linux on the embedded ARM processors, and an FOC motor control algorithm in the programmable logic. The Avnet ZedBoard 7020 is combined with an Analog Devices motor control module as well as a target brushless DC motor with hall sensors and an indexed encoder. Design software from Xilinx is included to further speed development. In addition, an optional motor control design bundle from MathWorks® delivers a complete turnkey solution for motor control algorithm development, including C and HDL code generation and target support for the Zynq-7000 AP SoC.
MCU vendors provide motor control development platforms as well. Freescale offers a three-phase BLDC/PMSM Motor Control Development Kit (Fig. 1) that targets a wide range of motors and includes a ready-made software development platform for 12-24Vdc, 4A motors. The kit also includes a variety of interfaces, such as CAN and USB to make it easier to create a complete system. A variety of MCUs are supported via a standard daughter card, so an engineer can select the best MCU for the target application.

Fig. 1: Freescale BLDC/PMSM low-voltage motor control drive kit.
Motor control development kits are not targeted just at high-end MCUs. For example, Renesas has a motor control development kit for the low-cost and low-power RL78 family, proving that motor control needs not be an expensive proposition. The Renesas Motor Control Development Kit drives a three-phase PMSM with an advanced sensorless FOC algorithm using the RL78/G14 MCU for a very cost-effective and power-efficient design.
Software Support for Motor Control Development
Perhaps the most dramatic change in the last few years has been in the creation of complex, yet very easy-to-use software development environments for designing motor control algorithms. Texas Instruments, for example, has created a range of software elements that address a variety of motor types including both FOC and BLDC designs. For BLDC-oriented designs, the TI InstaSPIN-BLDC technology can be used to easily adjust the operation of a BLDC motor using a single parameter, called the flux threshold. Fig. 2 below shows the InstaSPIN-BLDC GUI used with the three-phase BLDC motor kit and the PiccoloF28035 controlCARD subsystem. As seen in the GUI screen shot on the left side of the figure, the motor is running inefficiently. The red arrow in the insert shows the green waveform overshoot indicating that the commutation is happening too late. If the flux threshold level is reduced slightly, using the adjustment displayed on the small red slider at the bottom left in the GUI, the correct setting results in the improved green waveform seen in the GUI screen shot on the right side of the figure. The complexity of this advanced algorithm has been simplified to adjusting a single parameter, which dramatically improves the development cycle.
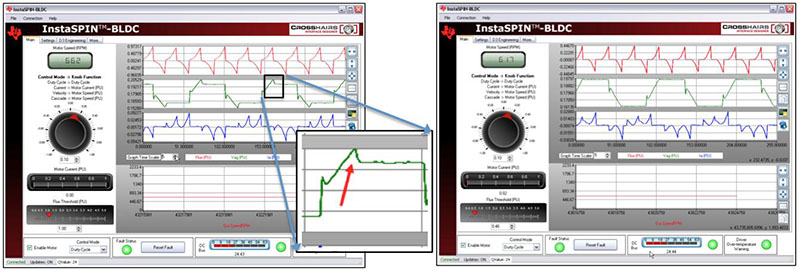
Fig. 2: Texas Instruments InstaSPIN-BLDC motor control development environment. (Figures courtesy of Texas Instruments)
Texas Instruments offers a similar software environment for FOC motor control as part of their LaunchPad Eco System. The InstaSPIN-FOC breakthrough motor technology has enabled motor control system designers to identify, tune and fully control (through variable speeds and loads) synchronous or asynchronous motors in just minutes. In celebration of the one-year birthday of this revolutionary motor control technology, Avnet and TI are offering the new TI InstaSPIN-FOC LaunchPad EVMfree to qualified customers.
Dramatic efficiency improvements are possible when using MCUs and FPGAs with advanced motor control support. The trend in supplying complete development environments for even the most complex algorithms will make it easy to hit even the most aggressive time-to-market window.
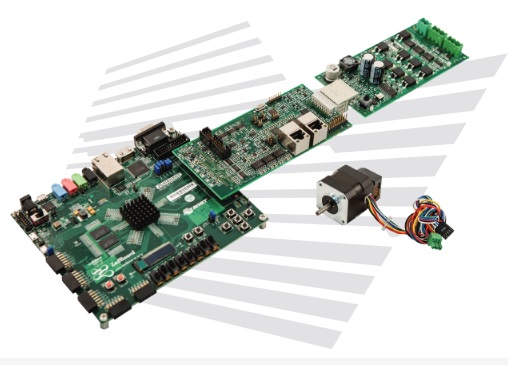
Fig. 3: Combining the Xilinx Zynq®-7000 All Programmable SoC ARM® dual-core Cortex™-A9 + 28 nm programmable logic with the latest generation Analog Devices high-precision data converters and digital isolation, the Avnet Xilinx® Zynq®-7000 All Programmable SoC/Analog Devices Intelligent Drives Kit enables high performance motor control and industrial networking connectivity.
Motor Control: A Quick Review
Brushed DC Motor
Brushed DC motors are the oldest motor topology still in wide use today. The topology features stationary brushes mounted to a stator (the fixed part of the motor core) frame, which rub against commutator segments on the rotor (the rotating part of the motor). As the rotor spins, different coils are energized and de-energized to create a magnetic field that applies torque to the motor. Brushed DC motors are very low cost due to their simplicity, but the sparks produced during operation result in electrical noise, reduced efficiency and hazardous operation, which can present significant disadvantages.
Brushless DC (BLDC) Electric Motor
The brushless DC motor can be viewed as an inside-out brushed DC motor. BLDC motors have windings on the stator and permanent magnets on the rotor. Thus there is no need for brushes or commutators since there is no need to provide electricity at the rotor. By varying the current into the stator windings, a torque is developed via interaction with the rotor magnets. (Note that the term “BLDC” is actually a misnomer since although the current into the windings typically comes from a DC power source, the winding currents are actually AC in nature or there would be no resulting motive force.) BLDC motors eliminate many of the disadvantages of brushed DC motors, but do require more complex and costly electronics.
AC Induction Motors
AC induction motors use a transformer-like winding structure and an alternating current to induce current flow in the rotor from the varying magnetic flux of the stator. The rotor produces its own flux and interacts with the stator to produce mechanical torque to move the motor. In order to produce torque, the rotor must move at a different speed than the rotating stator field, so the motor is classified as asynchronous. AC induction motors don't require magnets in the rotor and stator so they are more economical and reliable than some of their more technologically advanced cousins.
Field-Oriented Control (FOC)
A field-oriented control motor control algorithm (sometimes also called vector control) uses both voltage magnitude and frequency to control the energy applied to the motor. Mechanical rotor sensing isn’t needed because changes in magnetic flux and electrical current can be used to precisely determine motor position. Thus, these algorithms are typically called sensorless. Using computation hungry processes such as the Park Transform, these complex algorithms require significant computing resources and have been out of the reach of low-cost MCUs and FPGAs until only recently.
